Ocean Motion Technologies and our network of technical partners are dedicated to support autonomous sampling and novel data gathering platforms at sea. Below is a list of selected partners and projects that might be of interest to the RSRMPA Program.
For our Hardware as a Service offerings, please feel free to reach out: [email protected]
For our Hardware as a Service offerings, please feel free to reach out: [email protected]
|
Stone Aerospace
Stone Aerospace (SAS) is a distributed think tank specializing in AI-controlled, autonomous intelligent systems. SAS has developed and fielded generations of unmanned underwater vehicles (UUVs), robotic ice penetrators (cryobots), and computer-controlled closed-cycle life support systems to some of the world’s most remote places. |

|

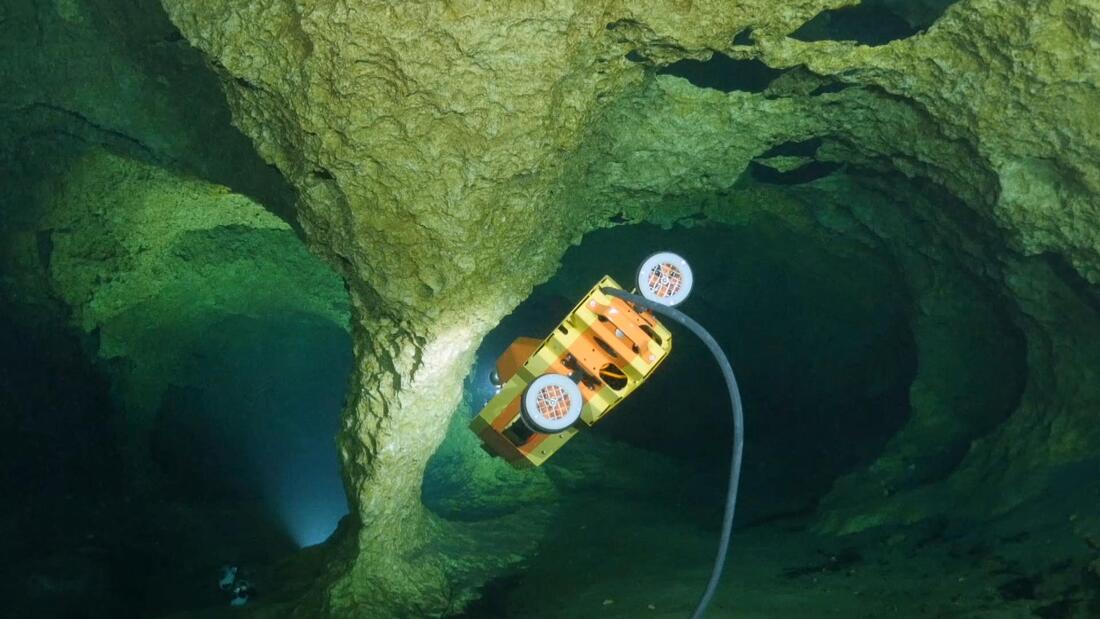
SAS UUV SUNFISH
SUNFISH is commercially available. Its range has been boosted to 25 km and run fully autonomously and/or with a 1Gbs fiber data link (paid out by the vehicle). The vehicle is a full 6 degree-of-freedom control that can cruise in a low drag configuration and then switch to full authority hover mode, which will keep station within centimeters even in a current. This makes SUNFISH an ideal partner for Ocean Motion's wave-powered data buoy's ability to charge the vehicle and upload data. The SUNFISH vehicle is sub-ice rated and can be deployed downhole - currently to a depth of 250 m. SAS also has designs already complete for a 1 km depth rating, which would give it access to any ice sheet in the Arctic and Antarctic. The vehicle can be run in four distinct operating modes: 1) ROV mode / joystick; 2) fully scripted missions; 3) supervised autonomy - where the vehicle deploys its own high bandwidth data link - currently available out to 8 km range - and operates autonomously through behavior control and with us able to watch over its shoulder; and 4) fully autonomous (no fiber). These allow for significant polar deployments wherein the vehicle can get to difficult places and dwell there, with hover control, and perform detailed science investigations. |

|

SAS Cryobot THOR
SAS is a leading lab in building and field testing operational cryobots. THOR is an industrial strength (50 kWth) cryobot that can reach 10 m/hour descent rate and carry 35 cm diameter payloads through ice to subglacial lakes and be retrieved to the surface at the end of the mission (via an onboard servo control system which melts its way back to the surface). SAS is capable of building build larger diameter systems as needed for instrument insertion (a 60 cm diameter payload faring, for example, could transport the current SUNFISH vehicle to a subglacial lake). THOR uses a 10 kV-AC surface power supply and operates from a 50 kW diesel generator. It can be run from any USAP OPP program generator with >50 kW capacity. The footprint for this system is about 1/25th that of the NSF WISSARD / SALSA hot water drilling system. It enables limitless dwell time in a subglacial lake with on-demand recovery to the surface (contrasted with the 24 hour science time available at a WISSARD drill site). |

|

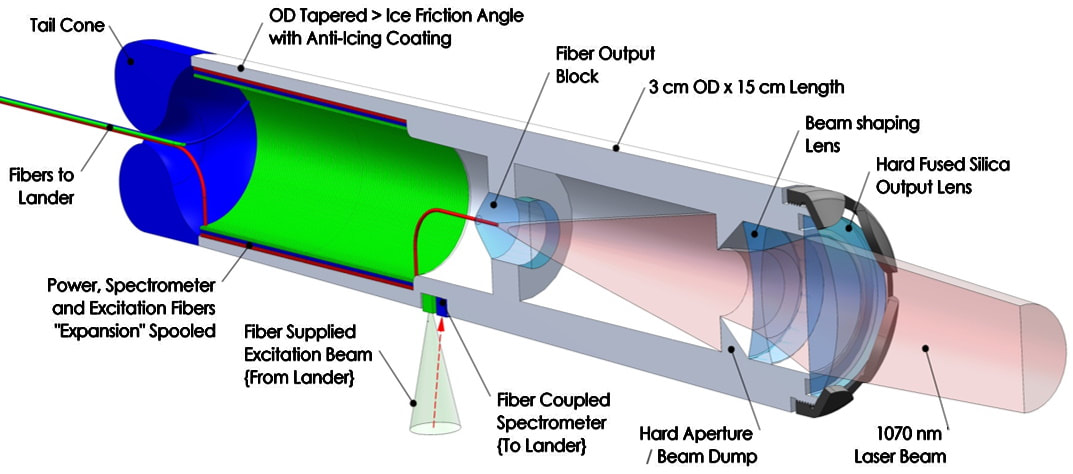
SAS Sensor DLP
Direct Laser Probe (DLP) is a laser powered rapid placement tool for deep string sensors in ice (temp, strain, seismic). DLP supports 4 km depths and the surface footprint is about 1/50th that of current NSF systems like WISSARD/SALSA. |
|
|
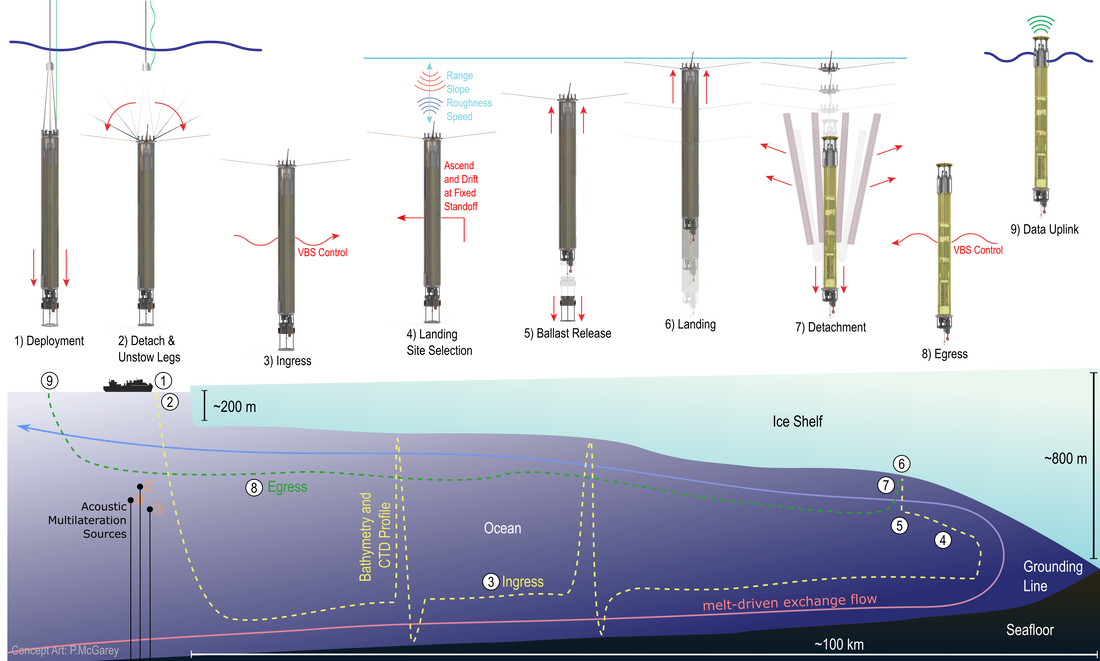
IceNode
IceNode is novel underwater vehicle from the NASA Jet Propulsion Laboratory (JPL) designed to acquire long-duration, concurrent, distributed in-situ melt rate measurements at the basal ice-ocean interface of Antarctic ice shelves. IceNodes are deployed as a swarm from a ship at the shelf edge (or through a single borehole), and use variable buoyancy to ride melt-driven exchange currents to high-science value landing areas far inside the cavity. IceNodes use advanced probabilistic AI guidance techniques and state-of-the-art ocean current models to control their depth to exploit varying current layers such that they are swept below their targets. Once underneath their target, IceNodes release a ballast weight to gain high positive buoyancy and attach to the underside of the ice shelf, where they acquire in-situ measurements of basal melt rate directly at the ice-ocean interface for a year or more. Finally, IceNodes detach from their landing structure and use variable buoyancy to ride melt-driven exchange currents back to open water, where they surface and transmit their mission data via Iridium link. |

|
|
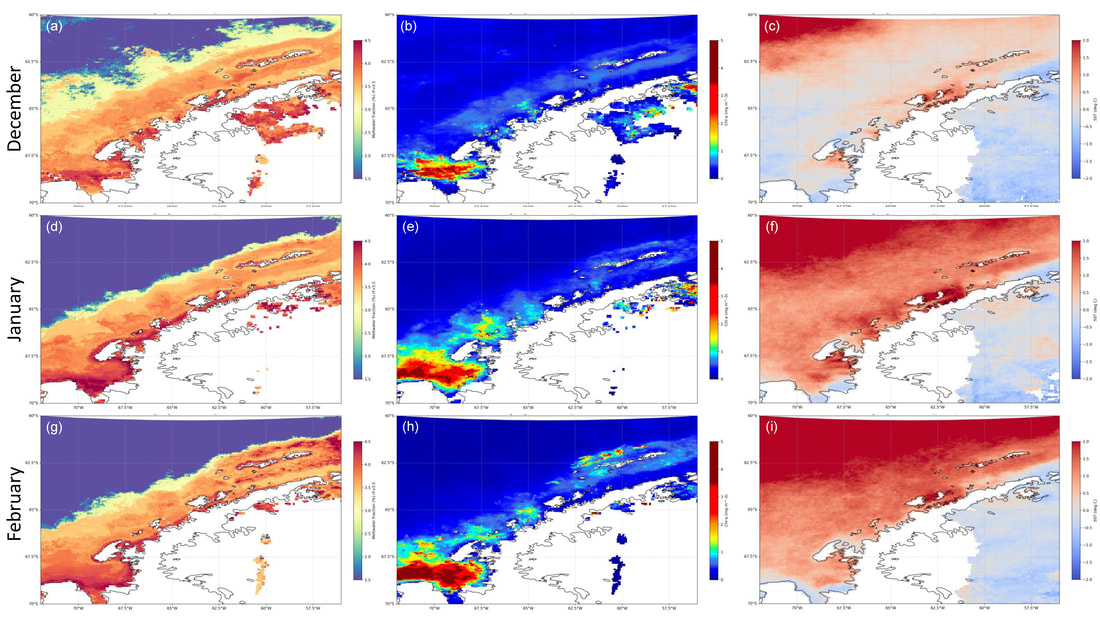
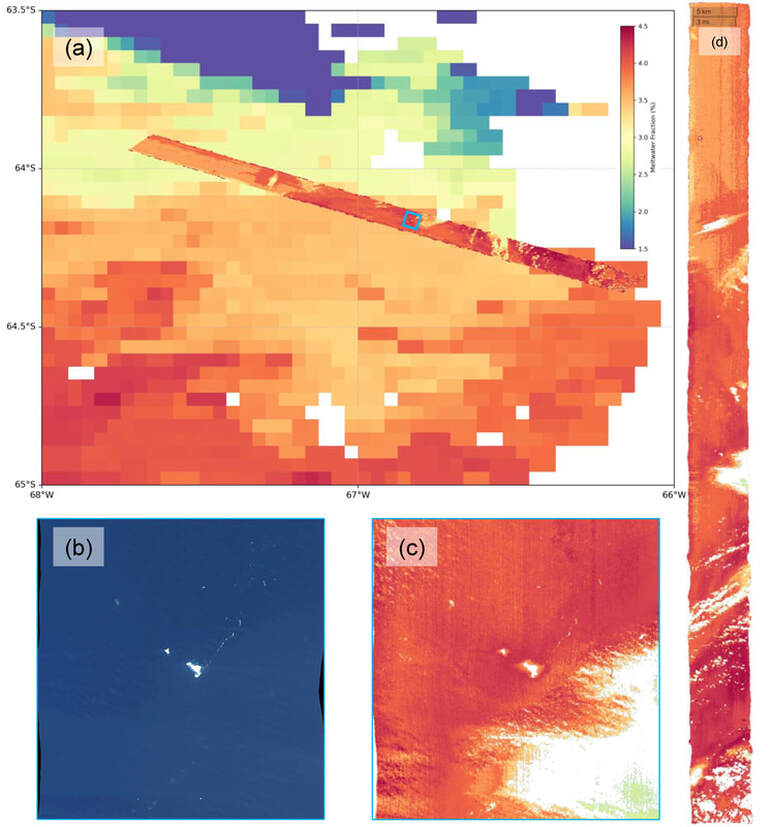
Glacial Meltwater Fraction via Ocean Color
From Pan et al. (2022): Abstract: Glacial meltwater is an important environmental variable for ecosystem dynamics along the biologically productive Western Antarctic Peninsula (WAP) shelf. This region is experiencing rapid change, including increasing glacial meltwater discharge associated with the melting of land ice. To better understand the WAP environment and aid ecosystem forecasting, additional methods are needed for monitoring and quantifying glacial meltwater for this remote, sparsely sampled location. Prior studies showed that sea surface glacial meltwater (SSGM) has unique optical characteristics which may allow remote sensing detection via ocean color data. In this study, we present a robust first-generation model for quantifying SSGM that can be applied to both spaceborne and airborne ocean color platforms. In addition, the model was prepared and verified with one of the more comprehensive in-situ stable oxygen isotope datasets compiled for the WAP region. The SSGM model appears robust and provides relatively accurate predictions when compared with in-situ data, thus offering an additional novel method for quantifying and studying glacial meltwater in the WAP region. Pan, B.J., Gierach, M.M., Meredith, M.P., Reynolds, R.A., Schofield, O., Orona, A.J. (2022) Remote Sensing of Sea Surface Glacial Meltwater on the Antarctic Peninsula Shelf. Remote Sensing of Environment. Submitted. |
|
|
Wave Energy Device + Blue Node
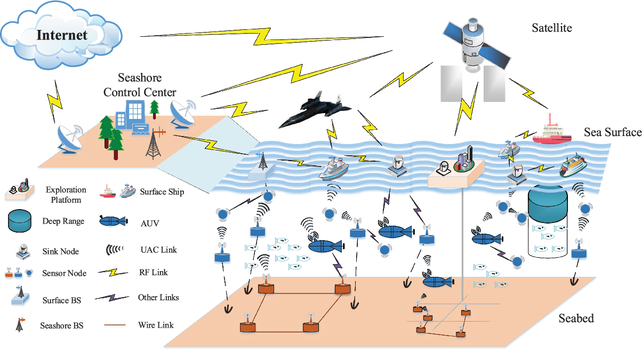
Ocean Motion Tech's (OMT) core technology is a small-scale off-grid ocean wave energy device built for low-power applications at sea, such as ocean observation, maritime monitoring, offshore aquauculture monitoring, and surveillance for coastal security and conversation enforcement. The bottleneck for big-data in the ocean lies in the power supply. Currently, there is no cost-effective power solution for off-grid, small-scale applications at sea. This issue is exacerbated by the necessity for expensive specialized oceanographic operations to maintain small-scale power infrastructure at sea, resulting in a lack of accessibility to critical ocean data for communities in need. Therefore, the challenge associated with marine data accessibility and big-data in ocean science is not only a data problem, it is also an energy problem. OMT Blue Node serves as a data beacon and power station to provide (UUV) charging, data offloading/backup, and communications/connectivity for Ocean of Things. Each Blue Node is a modular power and data platform aims to leverage an existing advanced ocean wave energy device as a foundational technology to build a big-data platform for ocean data gathering. We are working with an extensive network of experienced ocean equipment manufacturers, system integrators, distributors and marine service providers to derisk this technology. Our solution will be offered through an innovative business model (Hardware as a Service and/or Data as a Service) to significantly lower the cost for impacted communities and stakeholders. Ocean Motion Tech is also working with existing commercially off-the-shelf data integration tools to assimilate big data that were autonomously gathered from our Blue Node network. We also aim to leverage this data infrastructure to integrate our data products with other existing oceanographic databases via an accessible data portal and visualization tool to maximize the benefit of big blue data to more impacted stakeholders. The Blue Node project is supported by the US Department of Energy via the Powering the Blue Economy Initial. |
DARPA and Qiu et al. 2020
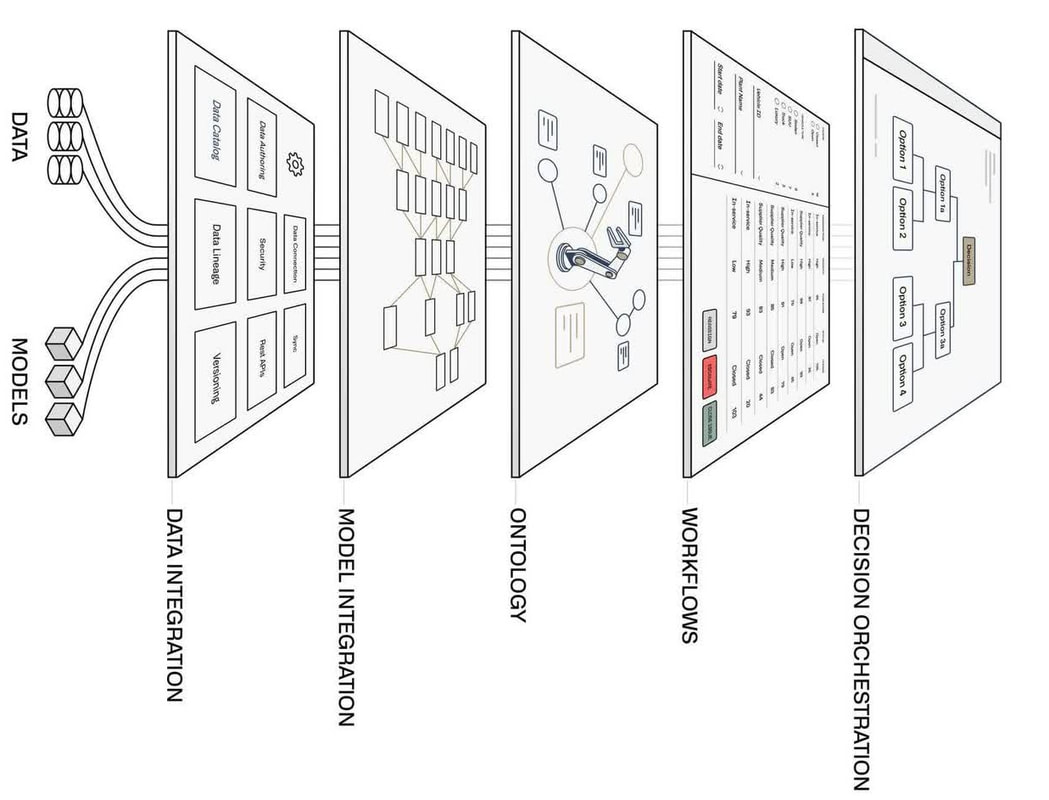
Palantir Foundry
|